
|
|
|
I am a second-year Masters Student at The Robotics Institute at Carnegie Mellon University, where I am working on subcanopy wildfire monitoring solutions at AirLab under the guidance of Professor Sebastian Scherer. Prior to this, I graduated top of my major, and received my Bachelors from the Department of Mechanical Engineering IIT Kharagpur, pursuing my B.Tech. in Manufacturing Science and Engineering. I also collaborated with, and completed by Bachelors Thesis under Prof. Joydeep Biswas on learning-based navigation in cluttered environments, at AMRL, UT Austin. At the Autonomous Ground Vehicle (AGV) Research Group at IIT Kharagpur I worked on S-LIME and participated in the Univeristy Rover Challenge 2021 and 2022, Indy Autonomous Challenge and IROS-RSJ Navigation and Manipulation Challenge, under the guidance of Prof. Debashish Chakravarty. My research interests lie in SLAM and path planning, specifically LiDAR based localisation, and learning-based and classical informed path planning. Feel free to check out my resume and drop me an e-mail if you want to chat with me! |
|
Dec '23 |
Published blog on Learned Heuristics for Informed Sampling in Sampling-based Kinematic Planners. |
|
Jul '23 |
Honoured to receive the prestigious K. C. Mahindra Education Trust Scholarship. |
|
Apr '23 |
Honoured to receive the prestigious Prof. G. S. Sanyal Cup at Gymkhana Awards 2023. |
|
Mar '23 |
I'll be joining the MRSD Fall 2023 batch at CMU! |
|
Mar '23 |
Published a blog on sampling-based planning with Weekly Robotics. |
|
Feb '23 |
Led the IIT Kharagpur Contingent to its 5th General Championship at the Inter IIT Tech Meet 11.0. |
|
Nov '22 |
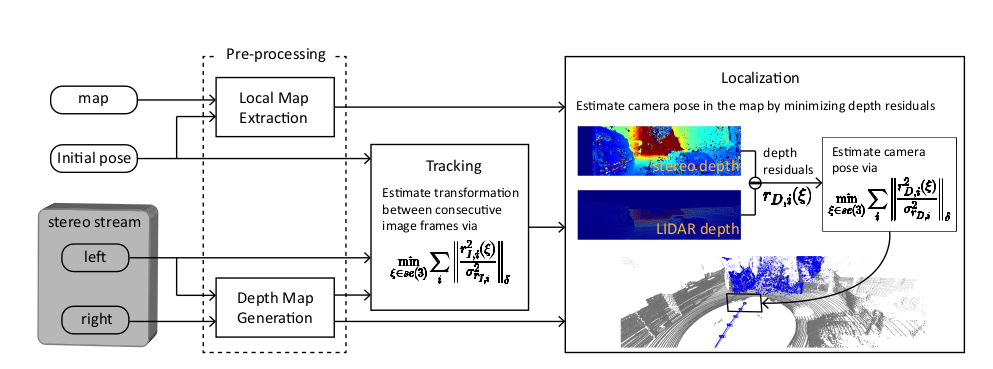
Published blog on Stereo-camera Localisation in LiDAR Environments. |
|
Jul '22 |
One paper accepted at ICCR 2022. |
|
May '22 |
Spending the summer at AMRL, UT Austin working on learning-based navigation! |
|
Mar '22 |
Won 1st place at the Inter IIT Tech Meet 2022 at the event 'DRDO UAV-guided UGV Navigation Challenge'. |
|
Sep '21 |
Won 1st place at the Navigation and Manipulation Challenge at IROS 2021! |
|
Sep '21 |
Joined AMRL, UT Austin as a student researcher. |
|
Mar '21 |
Won 2nd place at the Inter IIT Tech Meet 2021 at the event 'DRDO Vision-based Obstacle Avoidance Drone'. |
|
July '19 |
Joined the Autonomous Ground Vehicle Research Group as Mechatronics and SLAM team member. |
|
Jul '19 |
Started my undergrad at IIT Kharagpur! |

|
Coming Soon |

|
Developed an end-to-end solution for subcanopy wildfire monitoring, in a GPS-denied environment. Skills: Systems Engineering, Multi-Spectral Sensing, Autonomous Exploration |

|
[blog][report] This work explores (i) a self-refinement method to ground VQA respondes to the query image (to reduce hallucinations), (ii) a multimodal routing framework to learn failure patterns in SoTA models, in the realm of common sense reasoning for self-driving. Skills: VLMs, Self-alignment, Text-image grounding |

|
[blog][code][report] This project aims to leverage large field-of-view (FOV) cameras to explore point cloud prediction approaches, and essentially develop a 3D perception stack for a multi-camera large FOV setup. Skills: Multi-view fisheye reconstruction, occupancy prediction |
|
[blog] In this work, we explore generative methods to augment sampling-based planners with informed sampling capabilities, when constrained kinematically. Skills: GANs for informed sampling, learned heuristics for sampling-based planning, kinematically constrained RRTs, Dubins car |
|
[blog][code] We attempt to explore how we can efficiently exploit stereocameras in premapped LiDAR environments to get the best of both worlds - a low-cost relocalization solution in an HD map. Skills: Photometric residual minimization, heterogenous relocalization, Ceres Solver |
|
|
May 2024 - Aug 2024 Worked with Shubham Shrivastava and Abhyuday Puri on perception for off-road driving. Developed and productionized a multimodal multi-task model for ego trajectory prediction, from driver imitation. |

|
Present Worked under the supervision of Dr. Sebastian Scherer at AirLab, CMU on subcanopy wildfire monitoring solutions.[website] Also researching deep optical flow for fisheye odometry. |
|
|
September '21 - Dec '22 Worked under the supervision of Dr. Joydeep Biswas at AMRL, UT Austin on learning-based navigation for cluttered environments. My work focused on developing learned heuristics for informed sampling of sampling-based kinematic planners, for deploying in cluttered environments.[blog] |
|
|
September '21 - December '21 Worked under the supervision of Mr Siddharth Jha. Worked on the feature matching pipeline for UAV-based offline 3D reconstruction. |
|
|
March '21 - July '21 Worked under the supervision of Mr Haneesh Allu and Mr Besta Prem Sai. Worked on path planning and obstacles avoidance modules for autonomous UAVs for warehouse inpection. |
|
|
March '20 - May '23 Working under the supervision of Dr. Debashish Chakravarty at AGV, IIT Kharagpur on Stereo-camera Localisation in Mapped Environments [blog]. |
|
[paper] [code] We present a novel probabilistic planner and an integrated MPC controls stack for efficient multiple waypoint navigation. |
|
[GitHub] Co-organised by IIT Kharagpur and DRDO, India, as part of the Inter IIT Tech Meet 10.0, this challenge aimed to develop a UAV-guided navigation system which could guide cars on snowy terrains. Our team won first place, and also secured the Inter IIT Tech Meet 10.0 overall General Championship. |
|
|
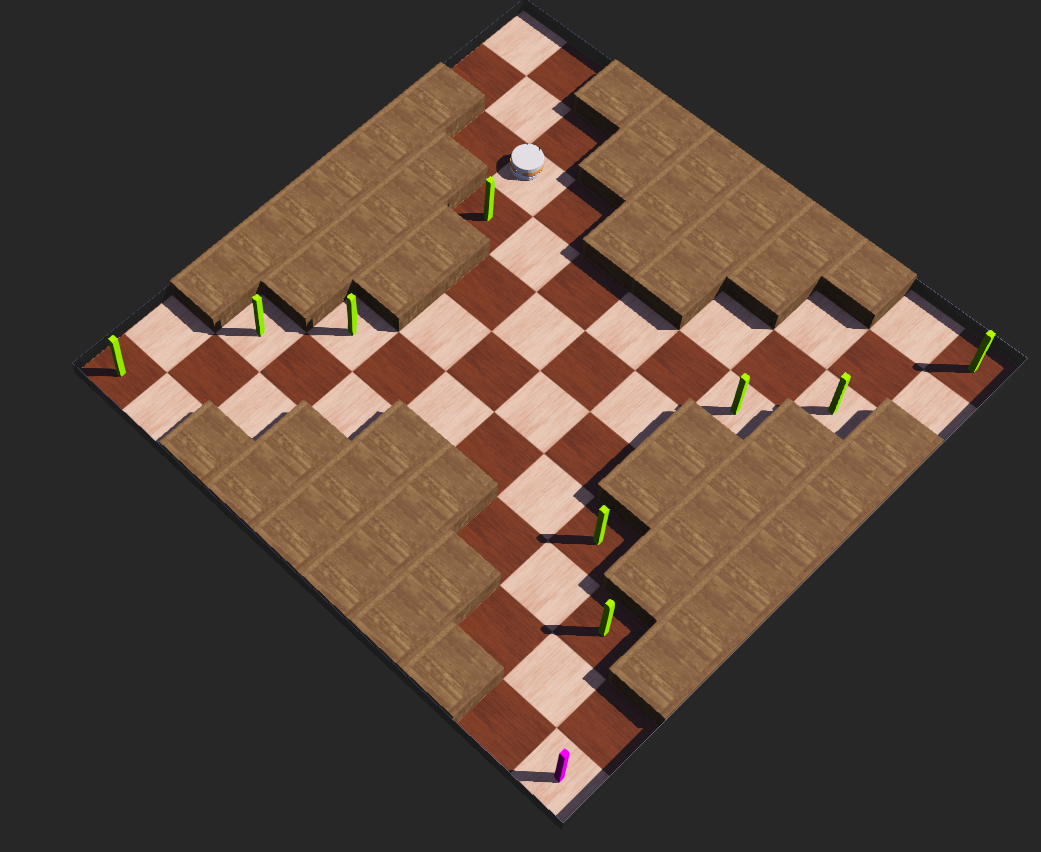
[challenge] [code] The task was to develop (in simulation) a mobile robot with a manipulator capable of multiple waypoint navigation and exploration. As the winning solution, we created a probabilistic route planner, which finds near-optimal solutions while respecting the computational capabilities of the robot and integrated this with an adaptive MPC. We presented this work at the International Conference on Control and Robotics 2022 in our paper "Multiple Waypoint Navigation in Unknown Indoor Environments" |
|
[challenge] Member of the IIT Kharagpur - IUPUI, Indiana - USB Colombia collaborative team. Designed tightly/loosely coupled high-speed localisation in for racecar localisation in pre-mapped LiDAR circuit. The localisation was using 3 static-state LiDARs. [code] Developed a ROS-based sensor testing module as part of the Base Vehicle Software team. [code] |
|
Co-organised by IIT Guwahati and DRDO, India, as part of the Inter IIT Tech Meet 9.0, this challenge aimed to develop a purely-vision based UAV navigation and exploration system, and ArUco marker landing for flood relief and delivery. Our team won first place, owing to our modified gbplanner solution. |
|
|
[challenge] Team Lead of the Mars Rover Team of the Autonomous Ground Vehicle Research Group, IIT Kharagpur Developed the wheel, chassis and suspension for rover prototype with 15 deg gradeability and max speed 20cm/s. Designed a 5-DOF modular robotic manipulator with 2-finger grip for semi-autonomous on-board equipment repair. |
|
[GitHub] A open-source Python package to demonstrated the difference in performance between sampling-based planning algorithms such as RRT, RRT* and Informed RRT*. |
|
[GitHub] An open-source implementation of graph-planning for 2R manipulators. |
This template is a modification to Jon Barron's website. Find the source code to my website here.